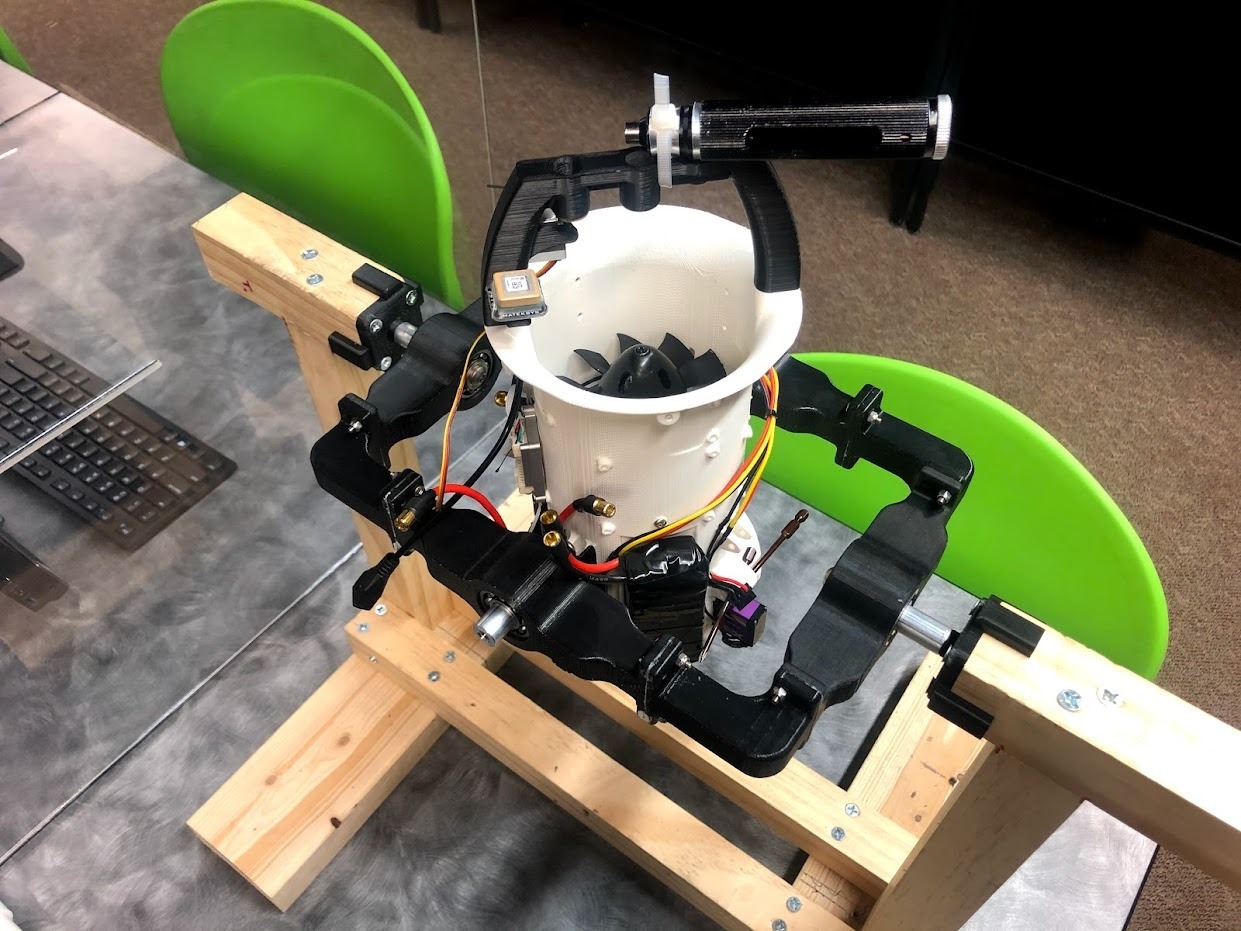
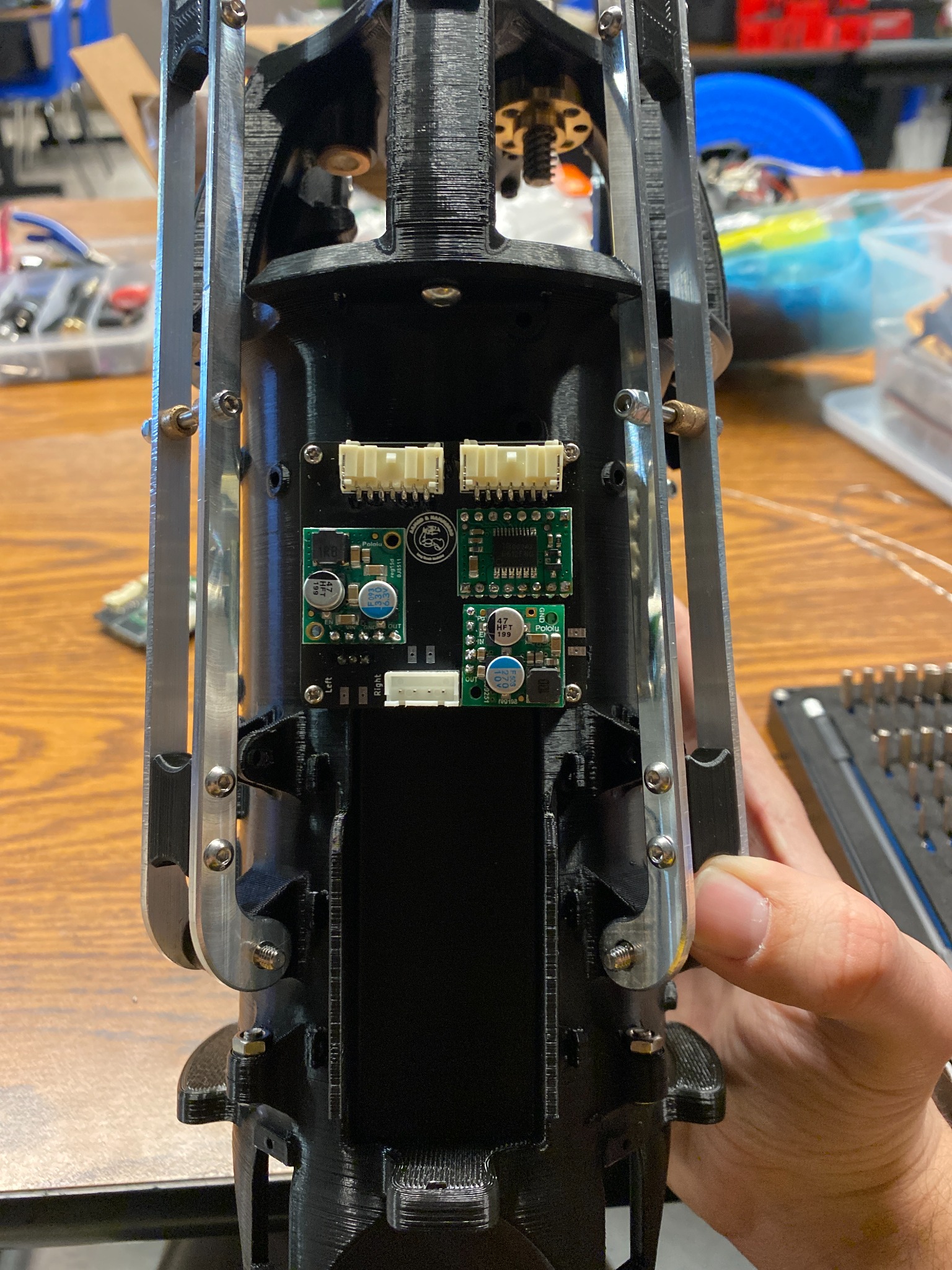
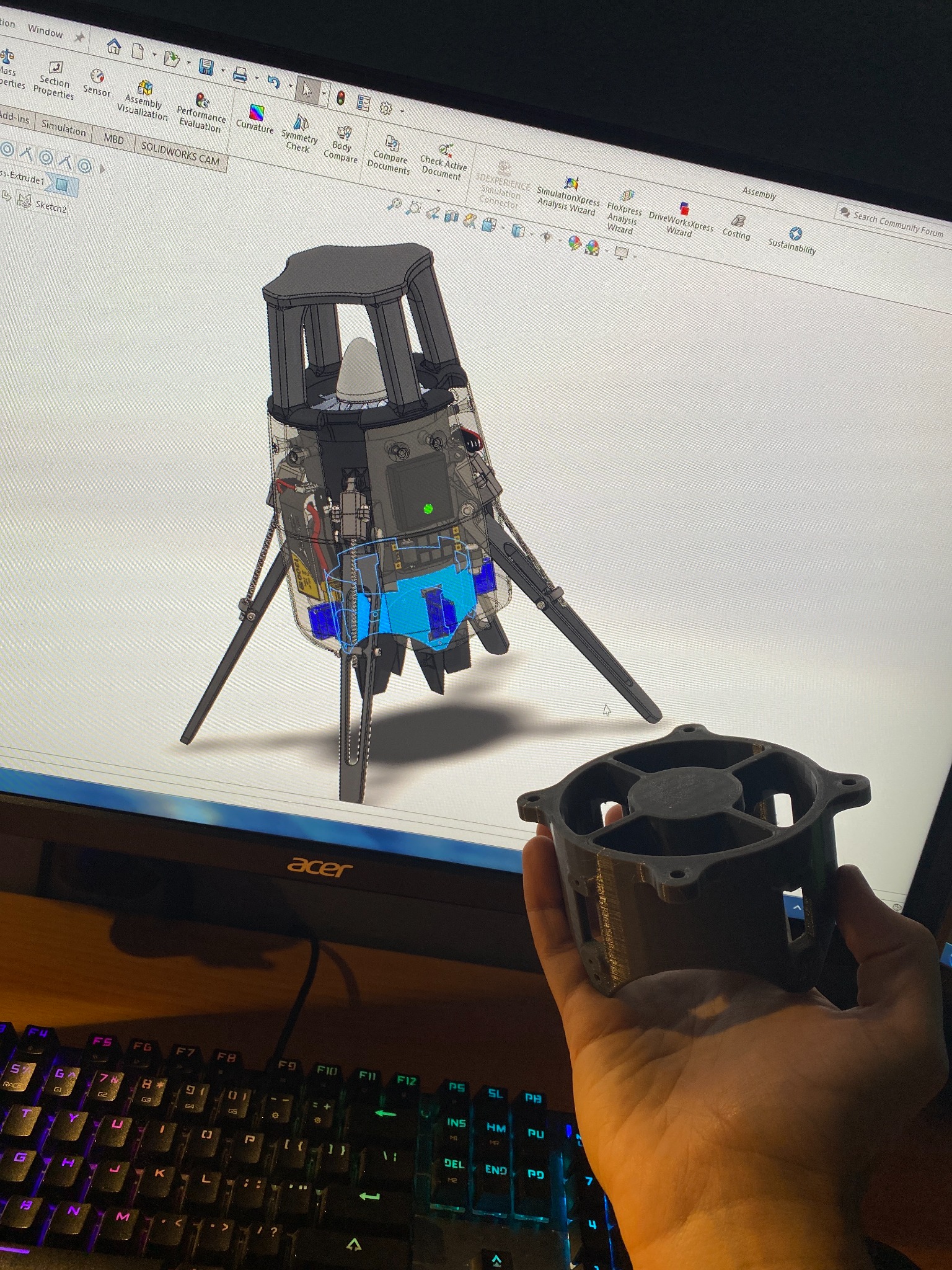
UAS Configuration
The UAS lander began sensor calibration and software configuration before flight testing.
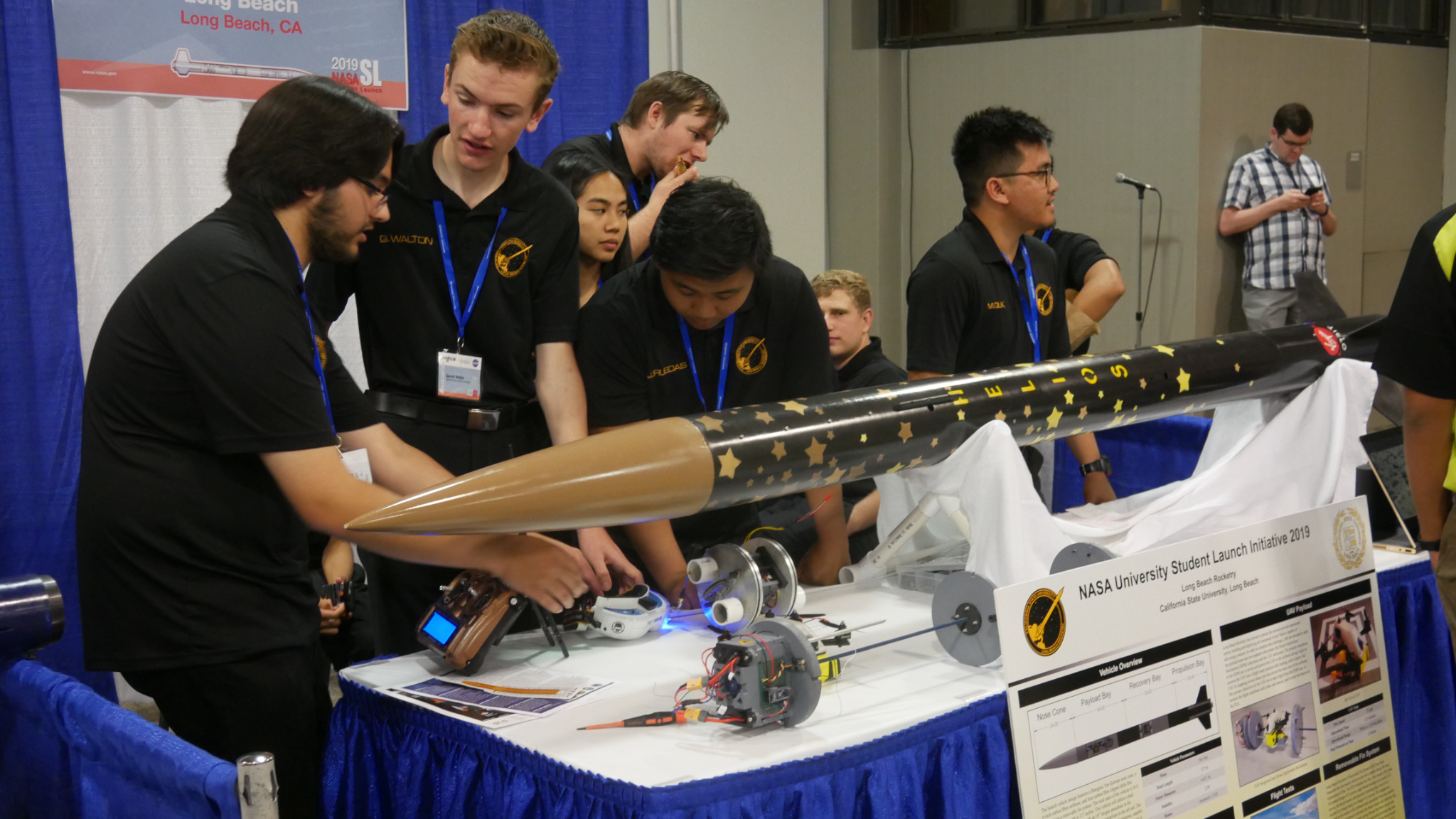
During my undergraduate career, I've had the honor of leading several engineering project teams, notably the payload team of CSULB’s Long Beach Rocketry, a participant in NASA's University Student Launch Competition. Guiding a team of 10-25 exceptional engineering students, we collaborated throughout multiple year-long competition design life cycles, with a strong emphasis on design review, mechanical design, test engineering, and system manufacturing. Working alongside these talented individuals not only enriched our projects but also forged lasting friendships, turning this academic experience into a privileged opportunity for both professional and personal growth.
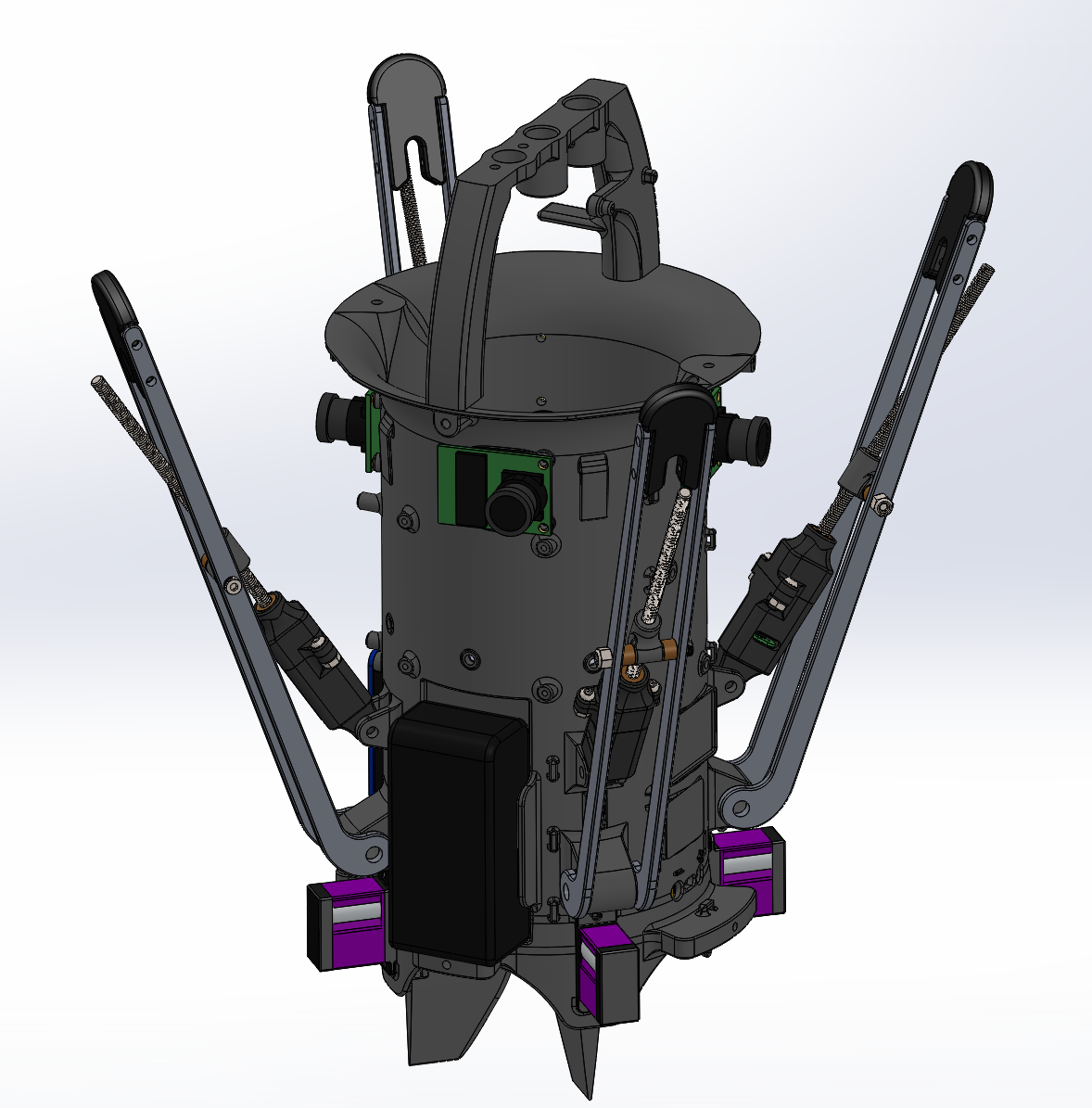
I was a part of Long Beach Rocketry from 2018-2022. In the 2018-2019 competition year I was the UAV lead responsible for leading a team of 5 students to design a UAV that had to deliver a 1 cubic inch cube to a specified target area. In the 2019-2020 competition year I was the payload lead responsible for leading a team of 13 students to design a larger UAV capable of collecting a simulated ice sample specified by NASA. On my last year of LBR I was the UAS lead responsible for leading a small team of students to design an autonomous lander that had to take a panoramic image upon landing.
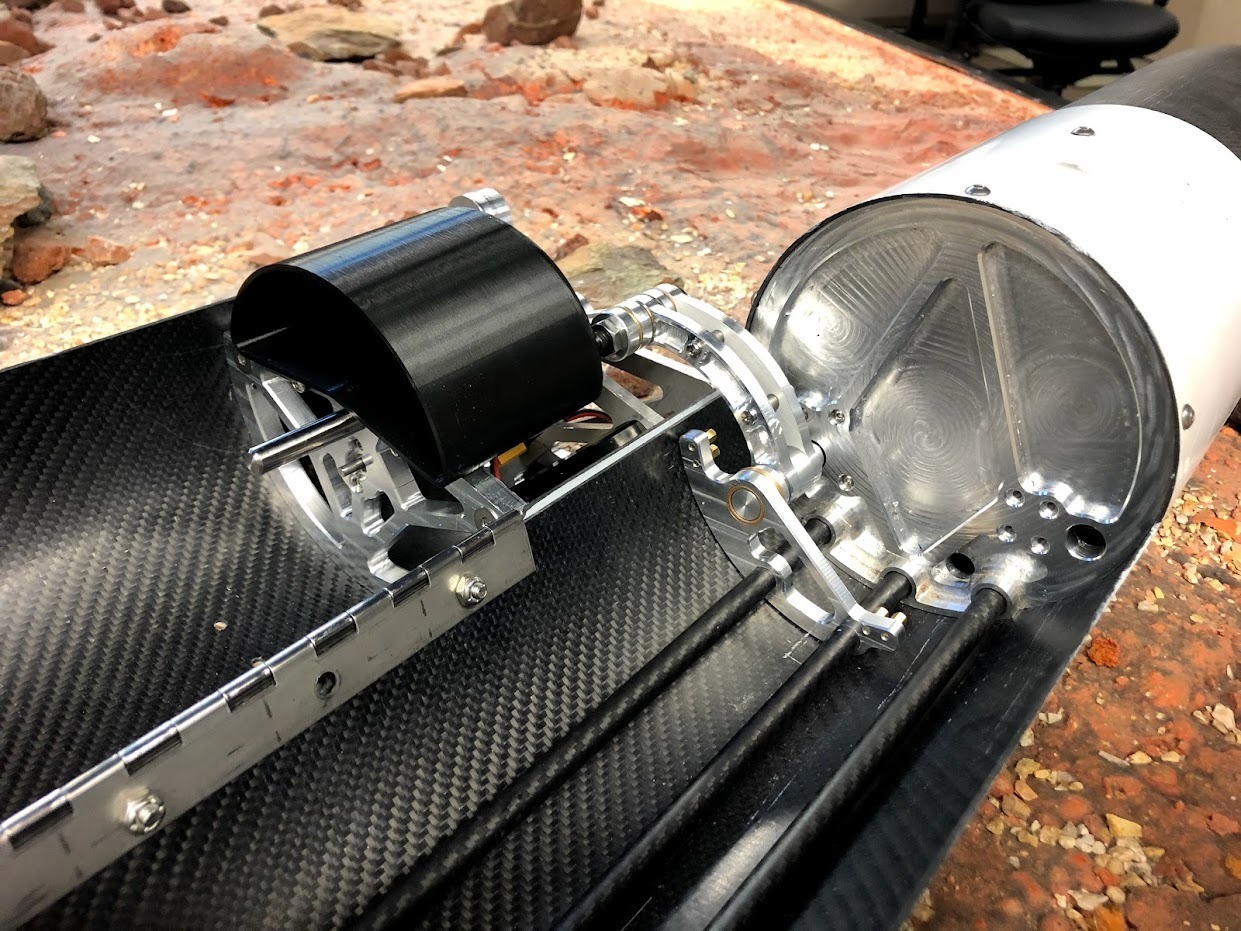
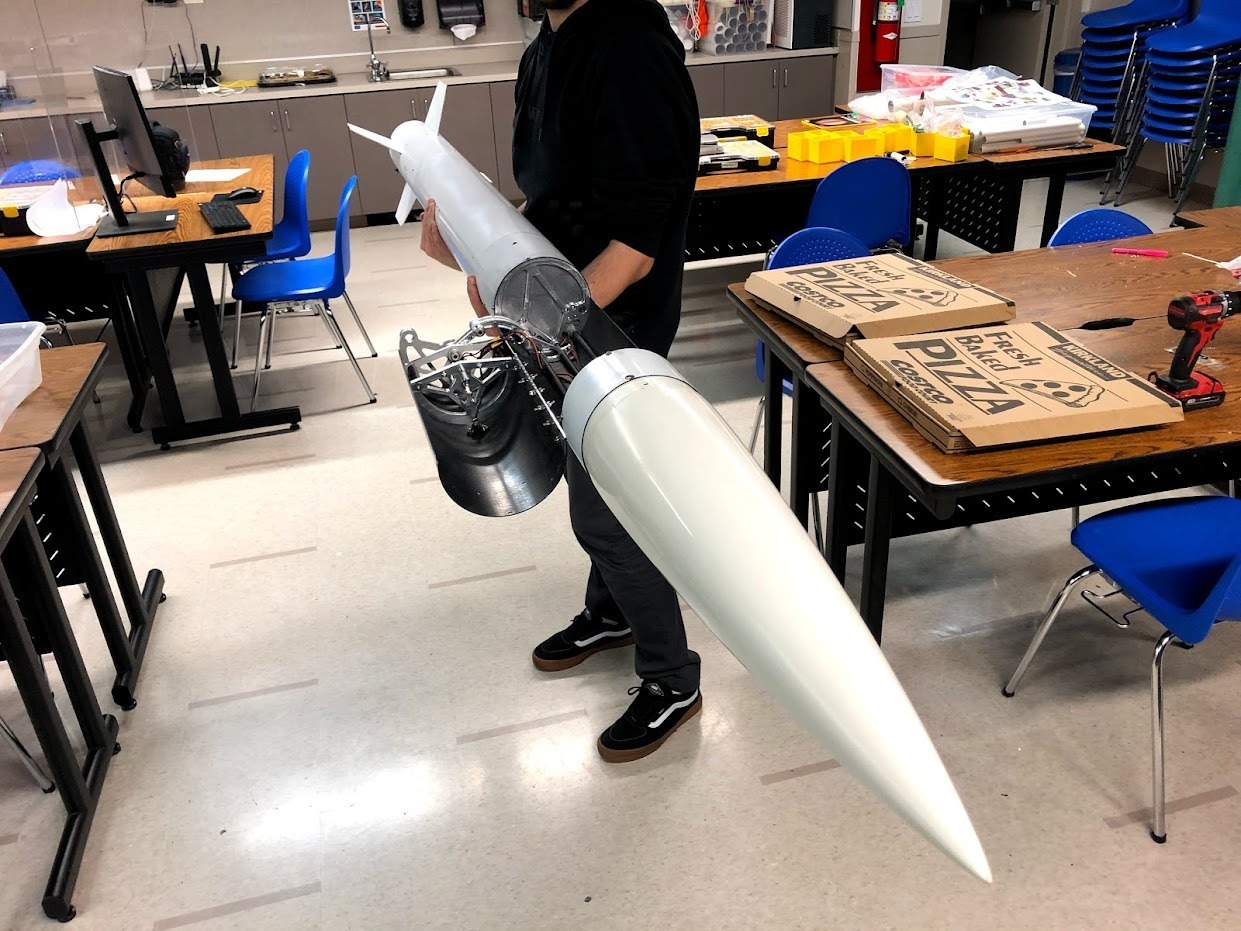
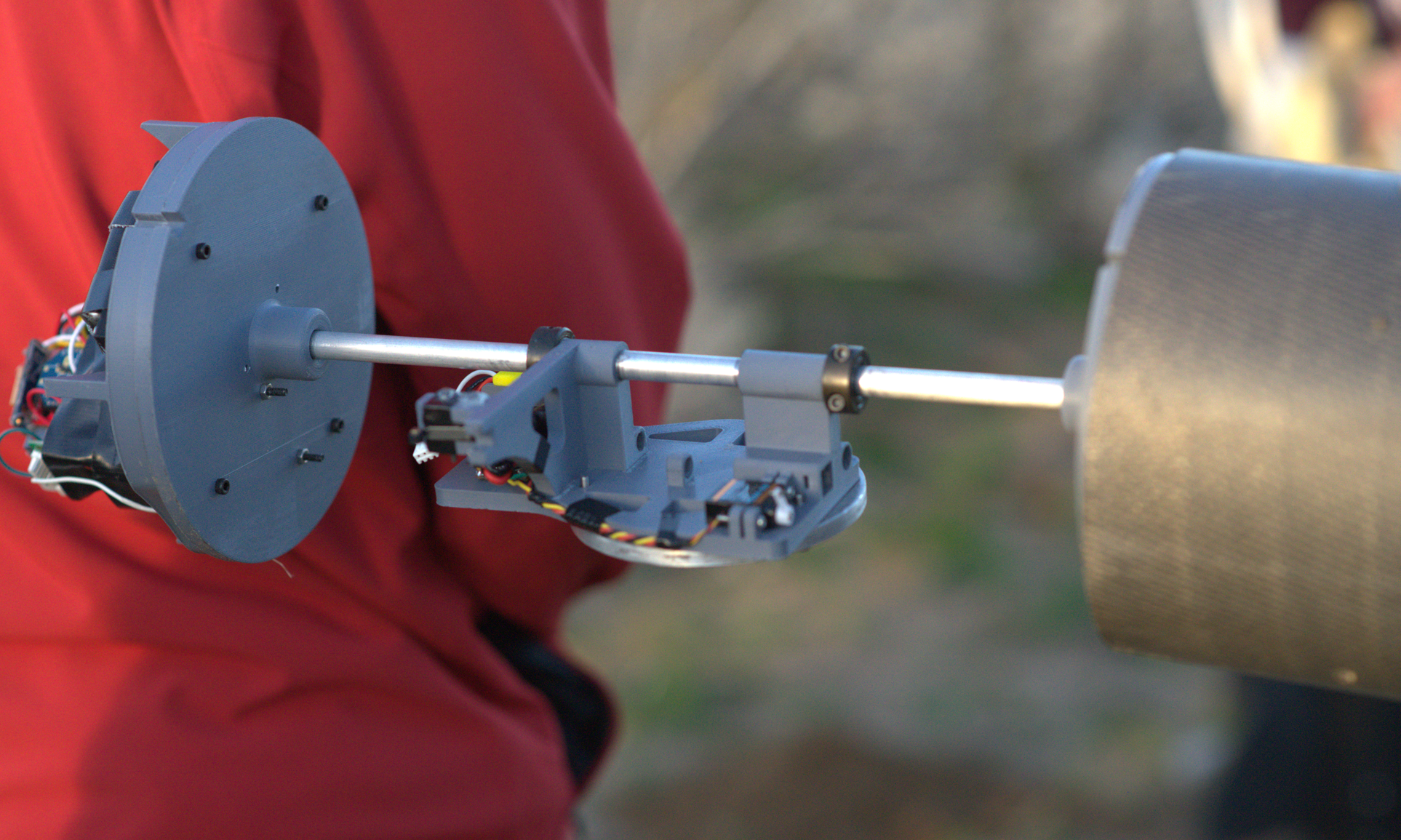
This project took place during the 2020-2021 NASA USLI competition year, and successfully jettisoned a autonomous unmanned aerial system (UAS) during the descent phase of the vehicle's mission. Upon jettison, the UAS would land, receive an arming signal, and begin its mission. The UAS would then fly to a GPS waypoint, land itself, self-level within 0.5° in all axes, and take a 360° panoramic photo which would then be sent to a ground station. This year's payload was awarded NASA's "Project Review" award, as well as "Best Looking" rocket award.

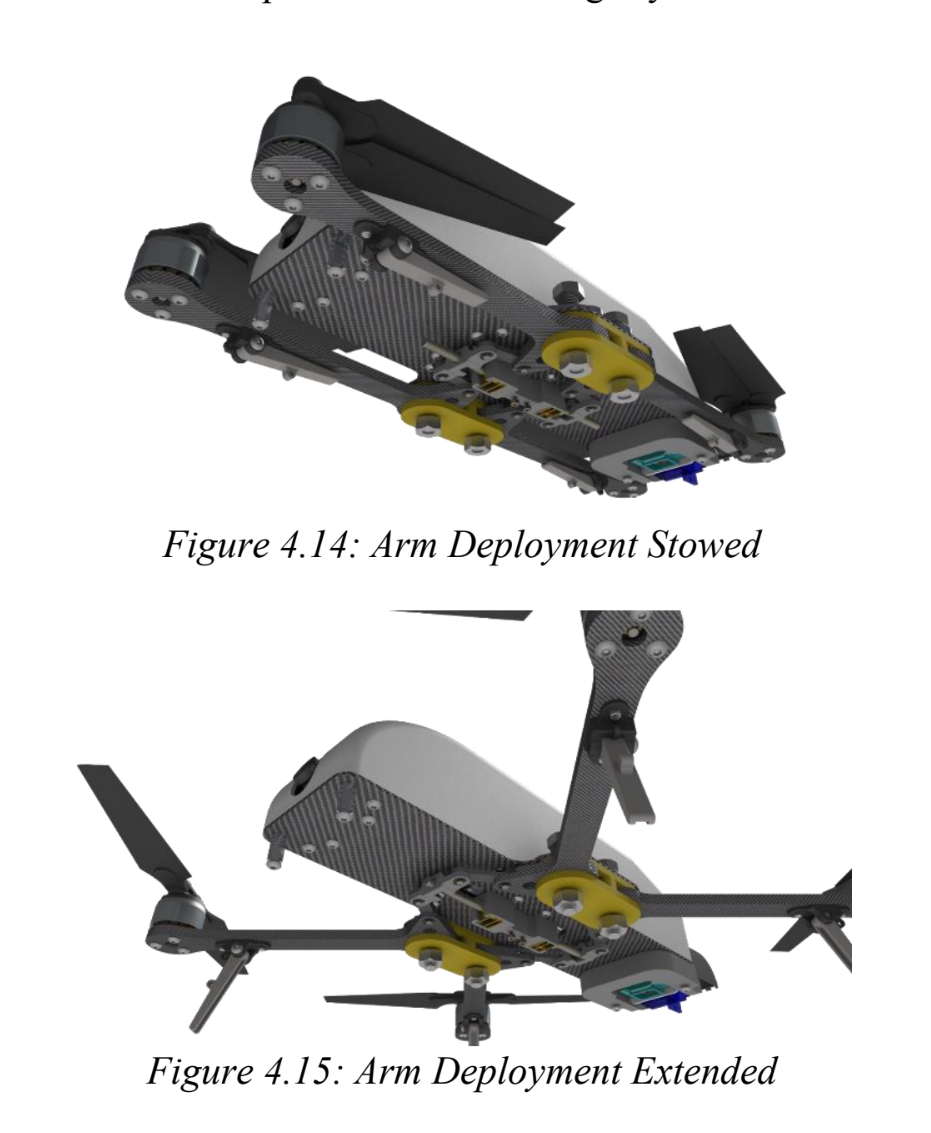
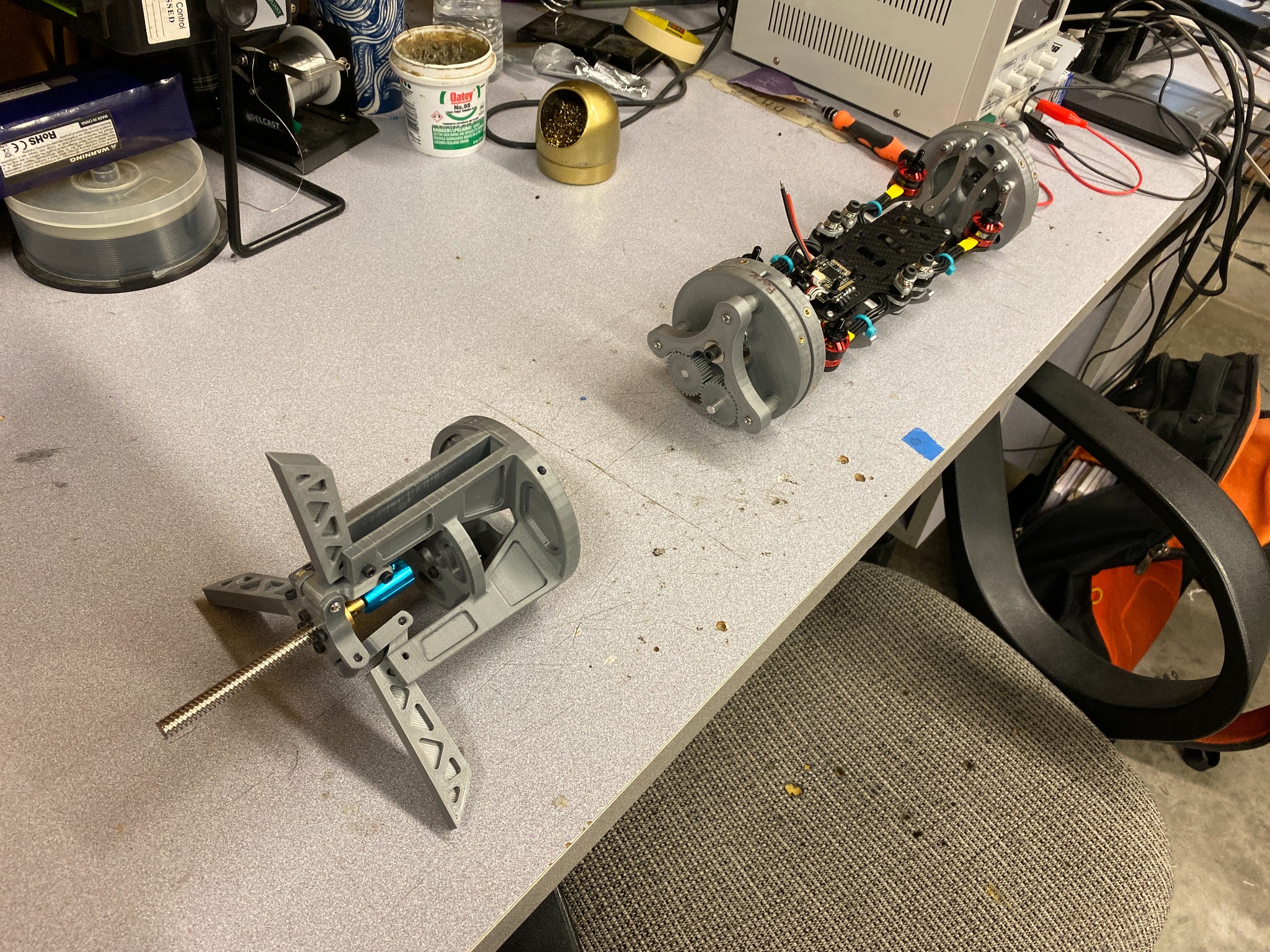
This project took place during the 2019-2021 NASA USLI competition year. Our team successfully designed a deployment system and UAV capable of deploying from a rocket to collect a 10mL sample of simulated ice. Upon recovery of the launch vehicle, the payload deployed an anchor to the ground via 3 arm anchors. This was done to rotate the entire payload bay such that the deployment doors were pointed towards the sky, and then deploy the UAV needed without any human intervention. After deployment the UAV then needed to fly to a target area in which a sample of ice needed to be collected.
This project took place during the 2018-2019 NASA USLI competition year. Our team successfully designed a deployment system and UAV capable of deploying from a rocket to deliver a 1 cubic inch cube to a specified target area. Upon recovery of the launch vehicle, the drone deployed out the forward end of the rocket. Once fully deployed, gravity oriented the UAV such that it was level with the horizon in order to take flight. Upon taking flight, the pilot (me) flew to the target area using an FPV (first person video) feed to deliver the cube. We were successful in all aspects of the competition and placed 4th place in the overall competition out of 60 teams! We even won 3rd place in best payload design!